jueves, 30 de abril de 2020
Deshabilitar servicios de Windows 10 con comandos desde consola o shell
https://www.barrahome.org/2016/11/02/deshabilitar-actualizaciones-forzadas-en-windows-10/
Deshabilitamos el servicio Update Orchestrator Service for Windows Update
sc config "UsoSvc" start=disabled
sc stop UsoSvc
Deshabilitamos el servicio Background Intelligent Transfer Service
sc config "BITS" start=disabled
sc stop BITS
Deshabilitamos Windows Update
sc config "wuauserv" start=disabled
sc stop wuauserv
https://winaero.com/blog/disable-service-windows-10/
Disable a service in Windows 10 using Command Prompt
sc stop "OneSyncSvc_2cddcd"
sc config "OneSyncSvc_2cddcd" start= disabled
sc stop "cbdhsvc_2cddcd"
sc config "cbdhsvc_2cddcd" start= disabled
topologias Inversora y no inversora para Filtros pasaaltas activos de primer Orden
topologias Inversora y no inversora para Filtros pasaaltas activos de primer Orden
https://wilaebaelectronica.blogspot.com/2017/01/filtro-pasa-altos-activo-de-1er-orden-rc.html



Calculadora Filtro Pasa altos Activo de 1er Orden RC inversor







Calculadora Filtro Pasa altos Activo de 1er Orden RC no inversor





https://wilaebaelectronica.blogspot.com/2017/01/filtro-pasa-altos-activo-de-1er-orden-rc.html
Filtro Pasa altos Activo de 1er Orden RC
Tema complementario Filtros Pasa altos
Un filtro pasa altos activo de primer orden RC como su nombre lo dice solo permite el paso de frecuencias altas y atenúa las frecuencias bajas. Esta compuesto por cinco elementos un condensador, tres resistencias, y un amplificador operacional (opamp). La entrada es por la resistencia R y la salida se toma en salida del amplificador operacional. Se conoce como activo porque contiene un elemento activo que es el amplificador operacional, y es de primer orden por que solo contiene un elemento reactivo ( un condensador). Tiene tres principales características: la ganancia puede ser mayor a uno, al ser de primer orden su atenuación es de 20db por década de frecuencia, y hay dos circuitos, el inversor y el no inversor.
Descarga la simulación en proteus 7.9 de Filtro Pasa altos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 8.3 de Filtro Pasa altos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 7.9 de Filtro Pasa altos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 8.3 de Filtro Pasa altos Activo de 1er Orden RC aquí.
Filtro Inversor
El circuito de un filtro inversor pasa altos activo de primer orden RC es el siguiente:
Función de transferencia inversor:
Para diseño las ecuaciones son las siguientes:
Tenga en cuenta
- “A” es la ganancia del filtro.
- fc es la frecuencia de corte.
- fc es la frecuencia de corte.
- El valor de C es libre.
- La salida es inversa respecto a la entrada, signo menos en la función de transferencia.
- La función de R+ es la de balancear el circuito, mas sin embargo se puede obviar, y reemplazar por un corto circuito.
Calculadora Filtro Pasa altos Activo de 1er Orden RC inversor
Como usar la calculadora:
- Para los datos de entrada en caso de tener decimales se usa el punto no la coma. De usar la coma se produce error.
- La frecuencia de corte fc se puede ingresar en Hertz (Hz), kilohertz (kHz) o en Megahertz (MHz).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- En el caso de la ganancia A se ingresa el valor absoluto de esta, debe tener un valor igual mayor a cero ( A ≥ 0).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- En el caso de la ganancia A se ingresa el valor absoluto de esta, debe tener un valor igual mayor a cero ( A ≥ 0).
- Las resistencias R, Rf y R+ se pueden ajustar a ohmios (Ω), kiloohmios (kΩ) o a Megaohmios (MΩ).
Ejemplo. Diseñe un filtro activo pasa altos inversor de primer orden RC con frecuencia de corte fc de 10 kHz. Ganancia de 2.
Solución. Se escoge C como 10nF. Se halla ahora R:
Ahora se halla el valor de Rf y R+:
El circuito queda de la siguiente manera:
La simulación es la siguiente:
La línea de color verde es la magnitud y la linea de color amarillo es la fase. Se puede observar que la magnitud tiene una ganancia de dos.
Filtro no Inversor
El circuito de un filtro no inversor pasa altos activo de primer orden RC es el siguiente:
Función de transferencia no inversor:
Para diseño las ecuaciones son las siguientes:
Tenga en cuenta
- “A” es la ganancia del filtro.
- fc es la frecuencia de corte del filtro.
- fc es la frecuencia de corte del filtro.
- La mínima ganancia en este filtro no inversor es 1.
- El valor de C es libre.
Calculadora Filtro Pasa altos Activo de 1er Orden RC no inversor
Como usar la calculadora:
- Para los datos de entrada en caso de tener decimales se usa el punto no la coma. De usar la coma se produce error.
- La frecuencia de corte fc se puede ingresar en Hertz (Hz), kilohertz (kHz) o en Megahertz (MHz).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- La ganancia A debe tener un valor igual o mayor a uno ( A ≥ 1).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- La ganancia A debe tener un valor igual o mayor a uno ( A ≥ 1).
- Las resistencias R, R1 y Rf se pueden ajustar a ohmios (Ω), kiloohmios (kΩ) o a Megaohmios (MΩ).
Ejemplo. Diseñe un filtro activo pasa altos no inversor de primer orden RC con frecuencia de corte fc de 10 kHz. Ganancia de 2.
Solución. Se escoge C como 10nF. Se halla ahora R:
Ahora se halla el valor de R1:
Ahora se halla el valor de Rf:
El circuito queda de la siguiente manera:
La simulación es la siguiente:
La línea de color verde es la magnitud y la línea de color amarillo es la fase. Se puede observar que la magnitud tiene una ganancia de dos.
Temas relacionados
topologias Inversora y no inversora para Filtros pasabajas activos de primer Orden
topologias Inversora y no inversora para Filtros pasabajas activos de primer Orden
https://wilaebaelectronica.blogspot.com/2017/01/filtro-pasa-bajos-activo-de-1er-orden-rc.html



Calculadora Filtro Pasa bajos Activo de 1er Orden RC inversor







Calculadora Filtro Pasa bajos Activo de 1er Orden RC no inversor




Filtro Pasa bajos Activo de 1er Orden RC
https://wilaebaelectronica.blogspot.com/2017/01/filtro-pasa-bajos-activo-de-1er-orden-rc.html
Filtro Pasa bajos Activo de 1er Orden RC
Tema complementario Filtros Pasa bajos
Un filtro pasa bajos activo de primer orden RC como su nombre lo dice solo permite el paso de frecuencias bajas y atenúa las frecuencias altas. Esta compuesto por cinco elementos un condensador, tres resistencias, y un amplificador operacional (opamp). La entrada es por la resistencia R y la salida se toma en salida del amplificador operacional. Se conoce como activo porque contiene un elemento activo que es el amplificador operacional, y es de primer orden por que solo contiene un elemento reactivo ( un condensador). Tiene tres principales características: la ganancia puede ser mayor a uno, al ser de primer orden su atenuación es de 20db por década de frecuencia, y hay dos circuitos, el inversor y el no inversor.
Descarga la simulación en proteus 7.9 de Filtro Pasa bajos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 8.3 de Filtro Pasa bajos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 7.9 de Filtro Pasa bajos Activo de 1er Orden RC aquí.
Descarga la simulación en proteus 8.3 de Filtro Pasa bajos Activo de 1er Orden RC aquí.
Filtro inversor
El circuito de un filtro inversor pasa bajos activo de primer orden es el siguiente:
Función de transferencia inversor:
Ecuaciones de diseño:
A tener en cuenta:
- “A” es la ganancia de este filtro.
- fc es la frecuencia de corte.
- fc es la frecuencia de corte.
- El valor de C es libre.
- La salida es inversa respecto a la entrada, signo menos en la función de transferencia.
- La función de R1 es la de balancear el circuito, mas sin embargo se puede obviar, y reemplazar por un corto circuito.
Calculadora Filtro Pasa bajos Activo de 1er Orden RC inversor
Como usar la calculadora:
- Para los datos de entrada en caso de tener decimales se usa el punto no la coma. De usar la coma se produce error.
- La frecuencia de corte fc se puede ingresar en Hertz (Hz), kilohertz (kHz) o en Megahertz (MHz).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- En el valor de la ganancia se ingresa el valor absoluto de esta, su valor debe ser igual o mayor a cero ( A ≥ 0).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- En el valor de la ganancia se ingresa el valor absoluto de esta, su valor debe ser igual o mayor a cero ( A ≥ 0).
- Las resistencias Rf, R y R1 se pueden ajustar a ohmios (Ω), kiloohmios (kΩ) o a Megaohmios (MΩ).
Ejemplo. Diseñe un filtro activo pasa bajos inversor de primer orden RC con frecuencia de corte de 10kHz. Ganancia de 2.
Solución. Se escoge C con un valor de 10nF. Ahora se halla Rf:
Luego hallamos R:
Y finalmente R1:
El circuito queda de la siguiente manera:
La simulación es la siguiente:
La magnitud es la línea de color verde y la fase es la línea de color amarilla. La frecuencia de corte es 10kHz.
Filtro no inversor
El circuito de un filtro no inversor pasa bajos activo de primer orden es el siguiente:
Función de transferencia no inversor:
Ecuaciones de diseño:
A tener en cuenta:
- “A” es la ganancia de este filtro.
- El valor de C es libre.
- La mínima ganancia A es 1.
- fc es la frecuencia de corte.
- fc es la frecuencia de corte.
Calculadora Filtro Pasa bajos Activo de 1er Orden RC no inversor
Como usar la calculadora:
- Para los datos de entrada en caso de tener decimales se usa el punto no la coma. De usar la coma se produce error.
- La frecuencia de corte fc se puede ingresar en Hertz (Hz), kilohertz (kHz) o en Megahertz (MHz).
- El valor de la ganancia A debe ser igual mayor a uno ( A ≥ 1).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- El valor de la ganancia A debe ser igual mayor a uno ( A ≥ 1).
- El condensador C se puede ingresar en picofaradios (pF), nanofaradios (nF), microfaradios (uF) o en milifaradios (mF).
- Las resistencias R, R1 y Rf se pueden ajustar a ohmios (Ω), kiloohmios (kΩ) o a Megaohmios (MΩ).
Ejemplo. Diseñe un filtro activo pasa bajos no inversor de primer orden RC con frecuencia de corte de 10kHz. Ganancia de 2.
Solución. Se escoge C con un valor de 10nF. Ahora se halla R:
Luego hallamos R1:
Y finalmente hallamos Rf:
El circuito queda de la siguiente manera:
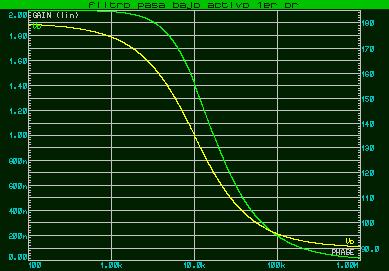
La simulación es la siguiente:
La magnitud es la línea de color verde y la fase es la línea de color amarilla. La frecuencia de corte es 10kHz.
Temas relacionados
Filtros analogicos
Filtros Pasa altos
Filtros Pasa bajos
Filtro pasa bajos Pasivo 1er Orden RC
Filtro pasa bajos Pasivo 1er Orden RL
Filtro pasa bajos Pasivo 2do orden RC
Filtro pasa bajos Pasivo 2do Orden RLC
Filtro pasa bajos Activo 2do Orden Sallen Key
Filtro pasa bajos Activo 2do Orden MFB
Filtros Pasa banda
Filtros Rechaza Banda
Filtros Pasa altos
Filtros Pasa bajos
Filtro pasa bajos Pasivo 1er Orden RC
Filtro pasa bajos Pasivo 1er Orden RL
Filtro pasa bajos Pasivo 2do orden RC
Filtro pasa bajos Pasivo 2do Orden RLC
Filtro pasa bajos Activo 2do Orden Sallen Key
Filtro pasa bajos Activo 2do Orden MFB
Filtros Pasa banda
Filtros Rechaza Banda
martes, 28 de abril de 2020
Disable Service Microsoft Text Input Application
Disable Service Microsoft Text Input Application
https://discourse.pi64.win/t/optimizing-windows-10-services-for-increased-performance/178/2
Microsoft Text Input Application = ghost keyboard - disable as follows:
reg add “HKLM\SOFTWARE\Microsoft\Windows NT\CurrentVersion\Image File Execution Options\WindowsInternal.ComposableShell.Experiences.TextInput.InputApp.exe” /v Debugger /d “%SystemRoot%\system32\systray.exe” /f
taskkill /im “WindowsInternal.ComposableShell.Experiences.TextInput.InputApp.exe” /t /f
https://discourse.pi64.win/t/optimizing-windows-10-services-for-increased-performance/178/2
Microsoft Text Input Application = ghost keyboard - disable as follows:
reg add “HKLM\SOFTWARE\Microsoft\Windows NT\CurrentVersion\Image File Execution Options\WindowsInternal.ComposableShell.Experiences.TextInput.InputApp.exe” /v Debugger /d “%SystemRoot%\system32\systray.exe” /f
taskkill /im “WindowsInternal.ComposableShell.Experiences.TextInput.InputApp.exe” /t /f
Excelente libro de Dinamica de Sistemas
Excelente libro de Dinámica de Sistemas
http://matema.ujaen.es/jnavas/web_modelos_empresa/laboratorio.htm
MODELOS DISCRETOS
MODELOS CONTINUOS
Respuesta de Circuitos RLC
http://www.ing.unp.edu.ar/electronica/asignaturas/ee016/apuntes/07/07.htm
7- Respuesta de Circuitos RLC
1. ¿En qué consiste el análisis transitorio de circuitos de segundo orden?Consiste en describir el comportamiento en función del tiempo de circuitos con dos elementos de almacenamiento. Nos vamos a limitar a analizar circuitos RLC paralelo y serie.Arriba2. ¿Cómo se obtiene la respuesta de un circuito RLC paralelo?
Aplicando LCK, obtenemos:
Para resolver esta ecuación, primero se supone que la expresión del voltaje es de tipo exponencial: v(t)=Aest . Reemplazando y sacando factor común, se obtiene:
La última ecuación se denomina ecuación característica del circuito paralelo. Si s1 y s2 son raíces de la ecuación característica...

donde:
... entonces, la solución de la ecuación que modela al circuito depende de las raíces de la ecuación característica.
Las tres soluciones posibles son:
Las constantes (A1,A2,B1,B2,...) se determinan empleando las condiciones iniciales.
Una vez determinado el voltaje, se pueden obtener fácilmente las corrientes sobre los distintos elementos.
Si directamente se quiere calcular iL(t), se pueden utilizar las siguientes expresiones:
Donde if es el valor final de la corriente sobre el inductor. Las constantes (A'1,A'2,B'1,B'2,...) se determinan empleando las condiciones de borde.
Ejemplo:
  Arriba3. ¿Cómo se obtiene la respuesta de un circuito RLC serie?
Aplicando LVK, obtenemos:
seguimos el mismo procedimiento que para el circuito RLC paralelo, y obtenemos la ecuación característica para el circuito serie. Si s1 y s2 son raíces de la ecuación característica...
donde, ahora:
... entonces, al igual que en el caso del circuito paralelo, la solución de la ecuación que modela al circuito serie depende de las raíces de la ecuación característica.
Las tres soluciones posibles son:
Las constantes (A1,A2,B1,B2,...) se determinan empleando las condiciones de borde.
Una vez determinada la corriente, se pueden obtener fácilmente los voltajes sobre los distintos elementos.
Si directamente se quiere calcular vc(t), se pueden utilizar las siguientes expresiones:
Donde vf es el valor final del voltaje en el capacitor. Las constantes (A'1,A'2,B'1,B'2,...) se determinan empleando las condiciones de borde.
Arriba4. ¿A qué hacen referencia los términos sobreamortiguado, subamortiguado y críticamente amortiguado?
Los términos describen el impacto del elemento disipador (R) sobre la respuesta a través del análisis de la frecuencia neper en comparación con la frecuencia resonante. Así, existen tres tipos de amortiguamiento:
Arriba5. Definiciones de las especificaciones de la respuesta transitoria
Muchos sistemas físicos son de segundo orden (o pueden ser aproximados a ellos). En la práctica, se puede desear que un sistema se comporte de determinada manera ante una entrada escalón unitario. A continuación, examinaremos la terminología necesaria para poder especificar el comportamiento temporal.
Observación:
Arriba | |||||||||||||||||||||||||||||||||||||||||||||||||
Suscribirse a:
Entradas (Atom)